Intelligente Kabelmanipulation durch KI-basierte Objekterkennung
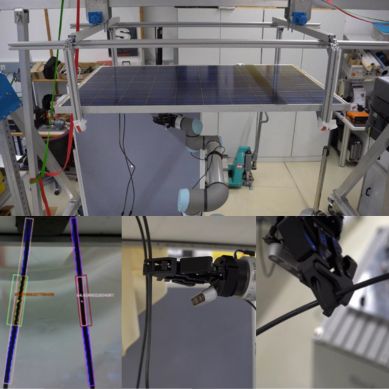
In diesem Projekt entwickeln wir ein flexibles System zur automatisierten Kabelmanipulation auf Basis moderner KI-Methoden. Ziel ist eine robuste Objekterkennung mit großem Sichtfeld – unabhängig vom Robotertyp und mit kostengünstiger Kameratechnik.
Herausforderungen
- Robuste und zuverlässige Objekterkennung
- Großer Sichtbereich für flexible Anwendungen
Methoden
- KI-basierte Objekterkennung
- Merkmalsextraktion, Lagebestimmung, Instanzsegmentierung
- Einsatz von ROS2 für nahtlose Systemintegration

Ihr Ansprechpartner
Dipl.-Ing., Dr. Markus Schörgenhumer, BSc
Business Area Manager Mechanics & Control
Weitere Referenzprojekte
Robotik im Agrarbereich
Einsatz von Robotik im Agrarbereich Simulation, Optimierung und Prototyping Die Landwirtschaft der Zukunft braucht effiziente, autonome Lösungen, die unter rauen…

Roboter für Rohrinspektion
Roboter für Rohrinspektion Autonome Inspektion von Tunnel-Drainagerohren Gemeinsam mit der ÖBB-Infrastruktur AG entwickelt die LCM GmbH den Tunnel Drainage Rover…

Autonome Müllentsorgung- und sortierung
Autonomer Abfall-Roboter LCM arbeitet gemeinsam mit der Firma Brantner an einem autonomen Robotersystem für das bedarfsgerechte Abfallmanagement im urbanen Bereich (z.B….
