Intelligent cable manipulation through AI-based object recognition
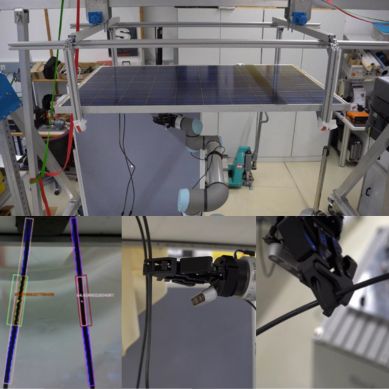
In this project, we are developing a flexible system for automated cable manipulation based on modern AI methods. The aim is robust object recognition with a large field of view – independent of the robot type and with cost-effective camera technology.
Challenges
- Robust and reliable object detection
- Large viewing area for flexible applications
Methods
- AI-based object recognition
- Feature extraction, position determination, instance segmentation
- Use of ROS2 for seamless system integration

Contact Person
Dipl.-Ing., Dr. Markus Schörgenhumer, BSc
Business Area Manager Mechanics & Control
Further reference projects
Robotics in the agricultural sector
Use of robotics in the agricultural sector Simulation, optimization and prototyping The agriculture of the future needs efficient, autonomous solutions…

Robot for pipe inspection
Robot for pipe inspection Autonomous inspection of tunnel drainage pipes Together with ÖBB-Infrastruktur AG, LCM GmbH is developing the Tunnel…

Autonomous waste disposal and sorting
Waste robots in public spaces LCM is working together with the company Brantner on an autonomous robot system that automatically…
